

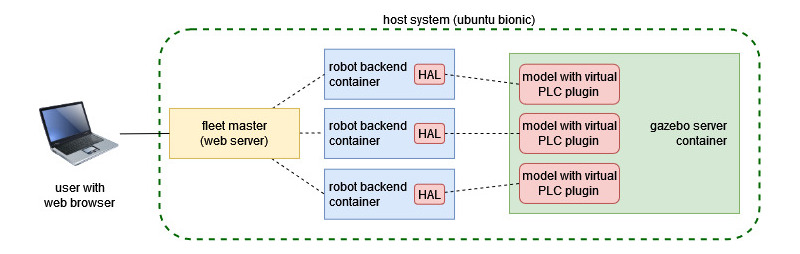

In this project, I created a simulation environment for multiple mobile robots using ROS and Gazebo. An important aspect of this project is that it utilizes a single Gazebo server to manage multiple robots, enabling each robot to sense the others. This was accomplished by employing the Gazebo server, which supplies inputs for the robots' sensors. Data transfer between the Gazebo server and the robots is facilitated through the Gazebo transport protocol. The robots' backend is implemented using ROS and is encapsulated within a Docker container, enabling the simultaneous operation of multiple robots on a single machine.
Tech stack: C++, Python, ROS, Gazebo, Docker
|
|
|
|
|
|
|
|