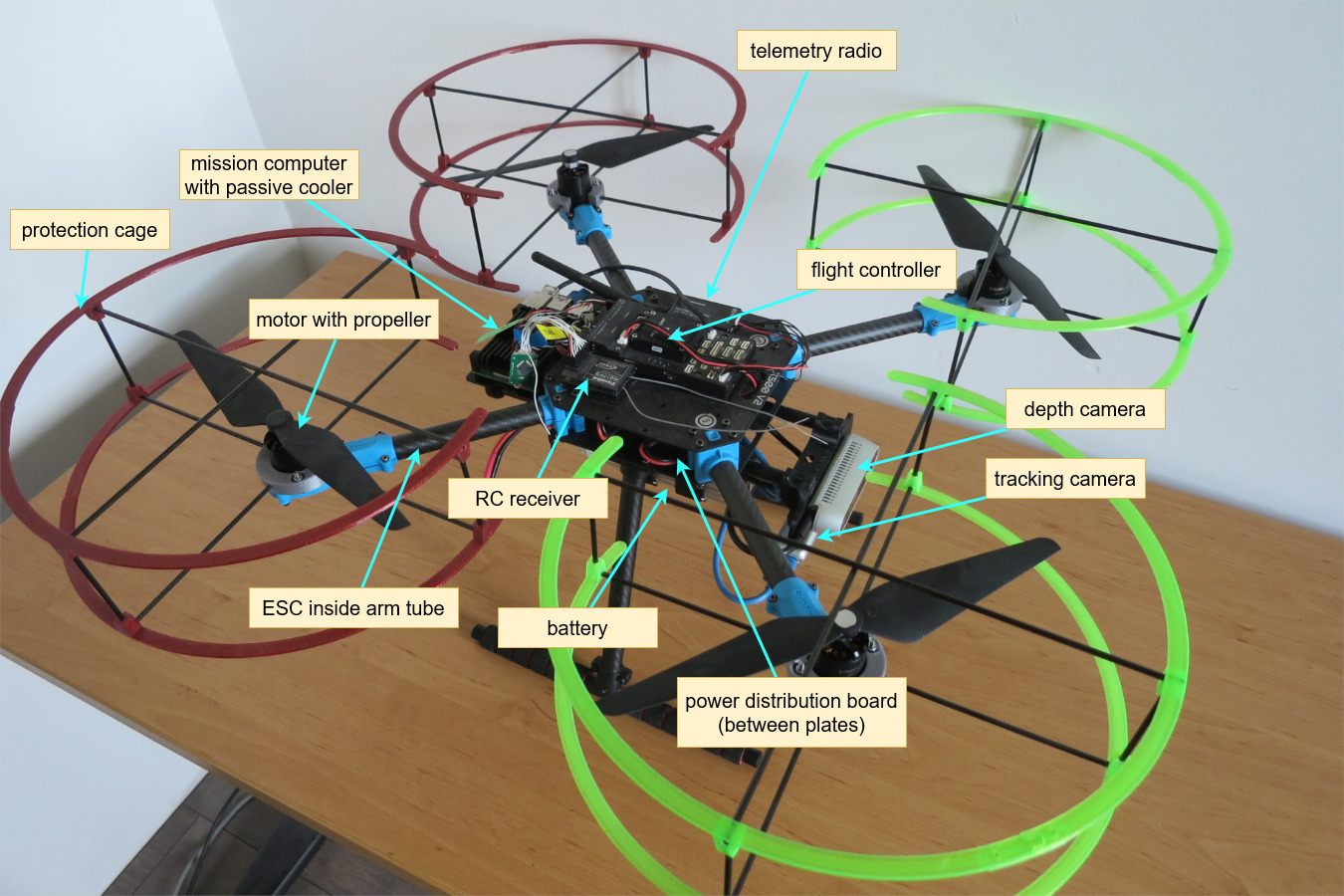
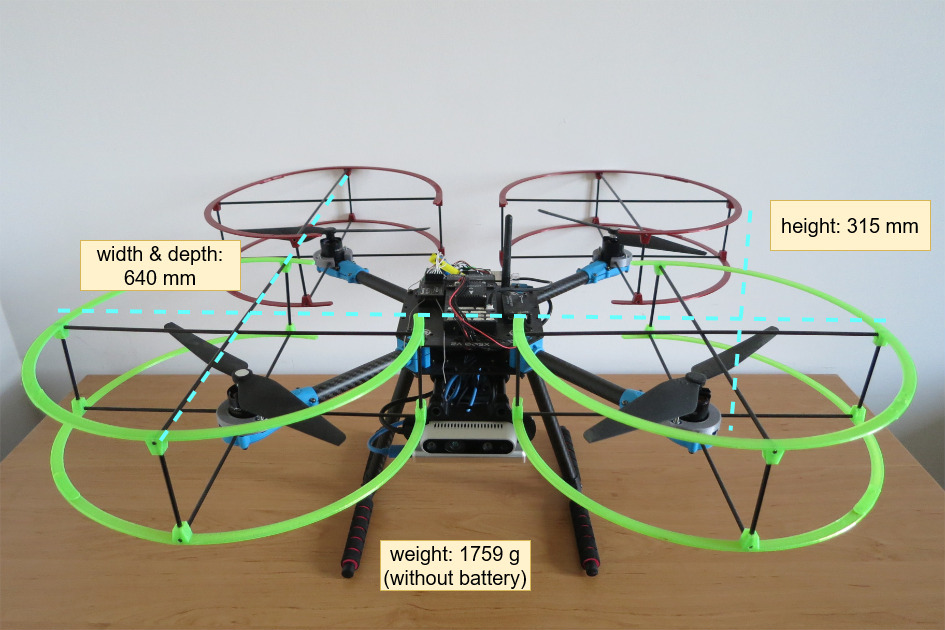

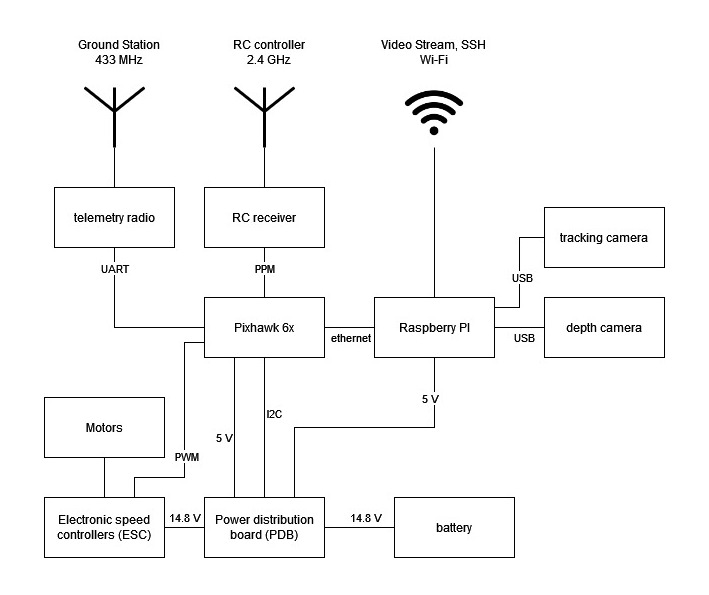
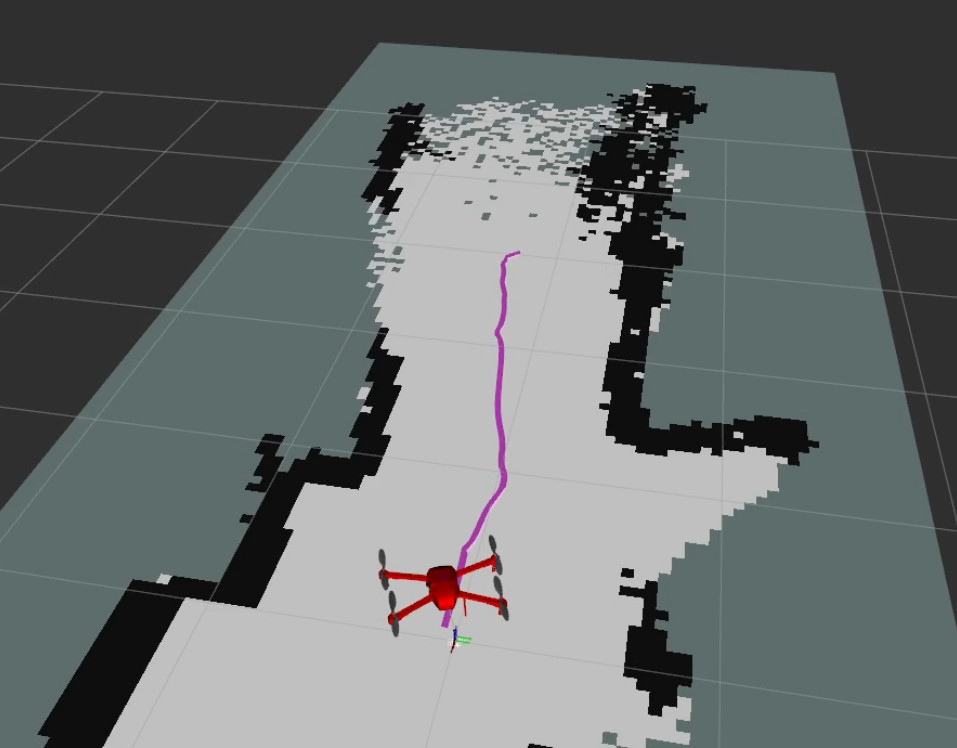
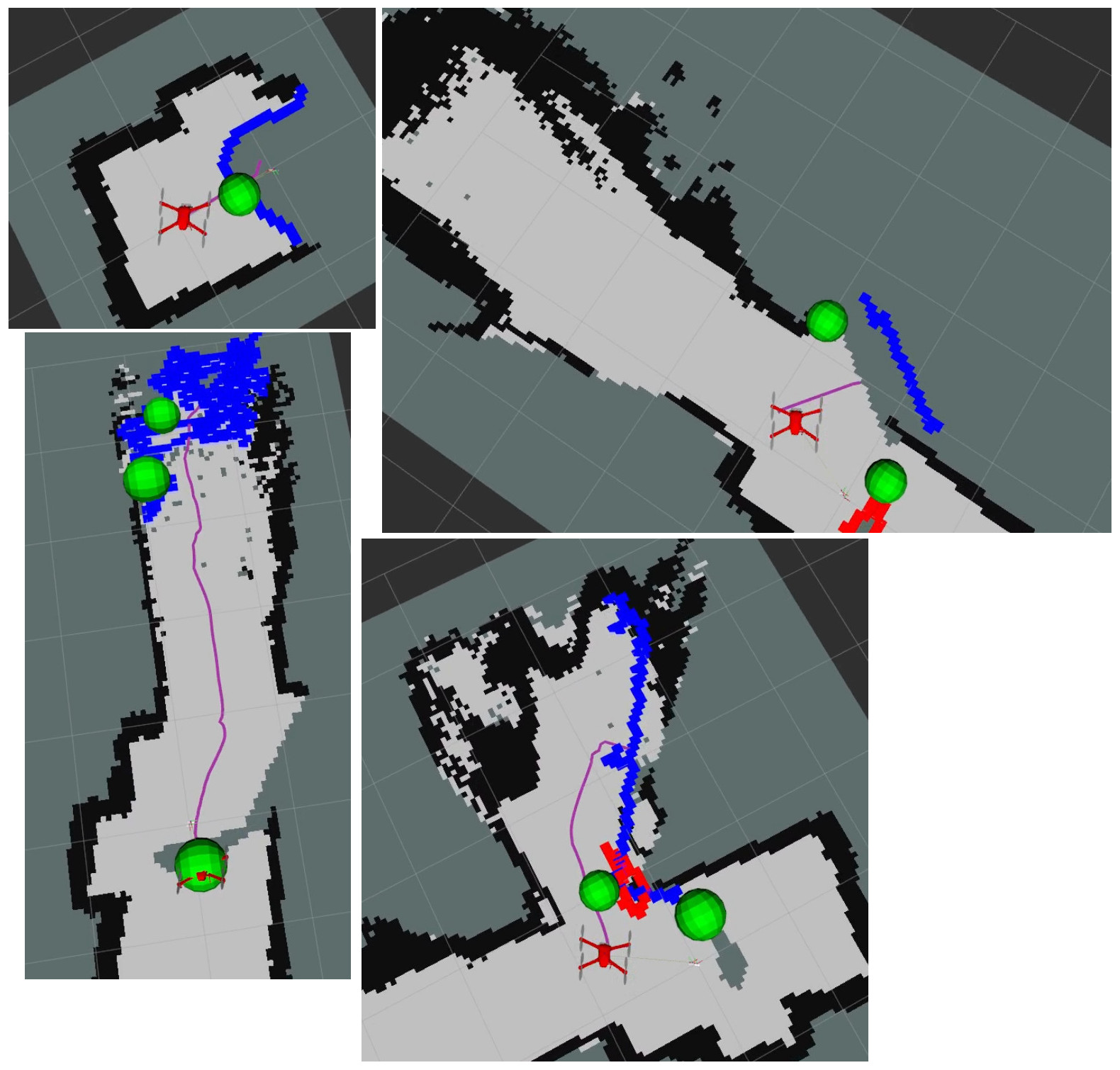
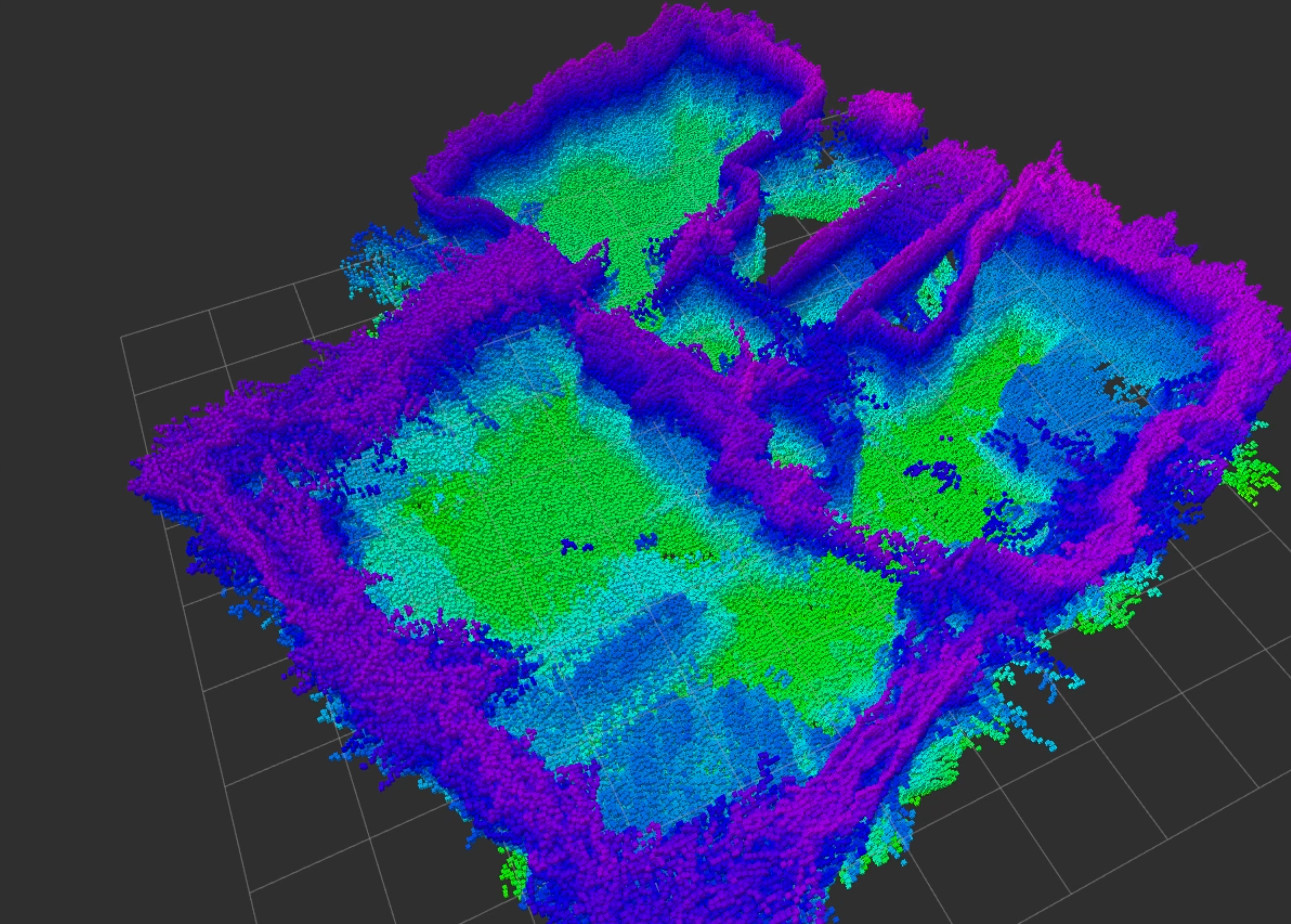
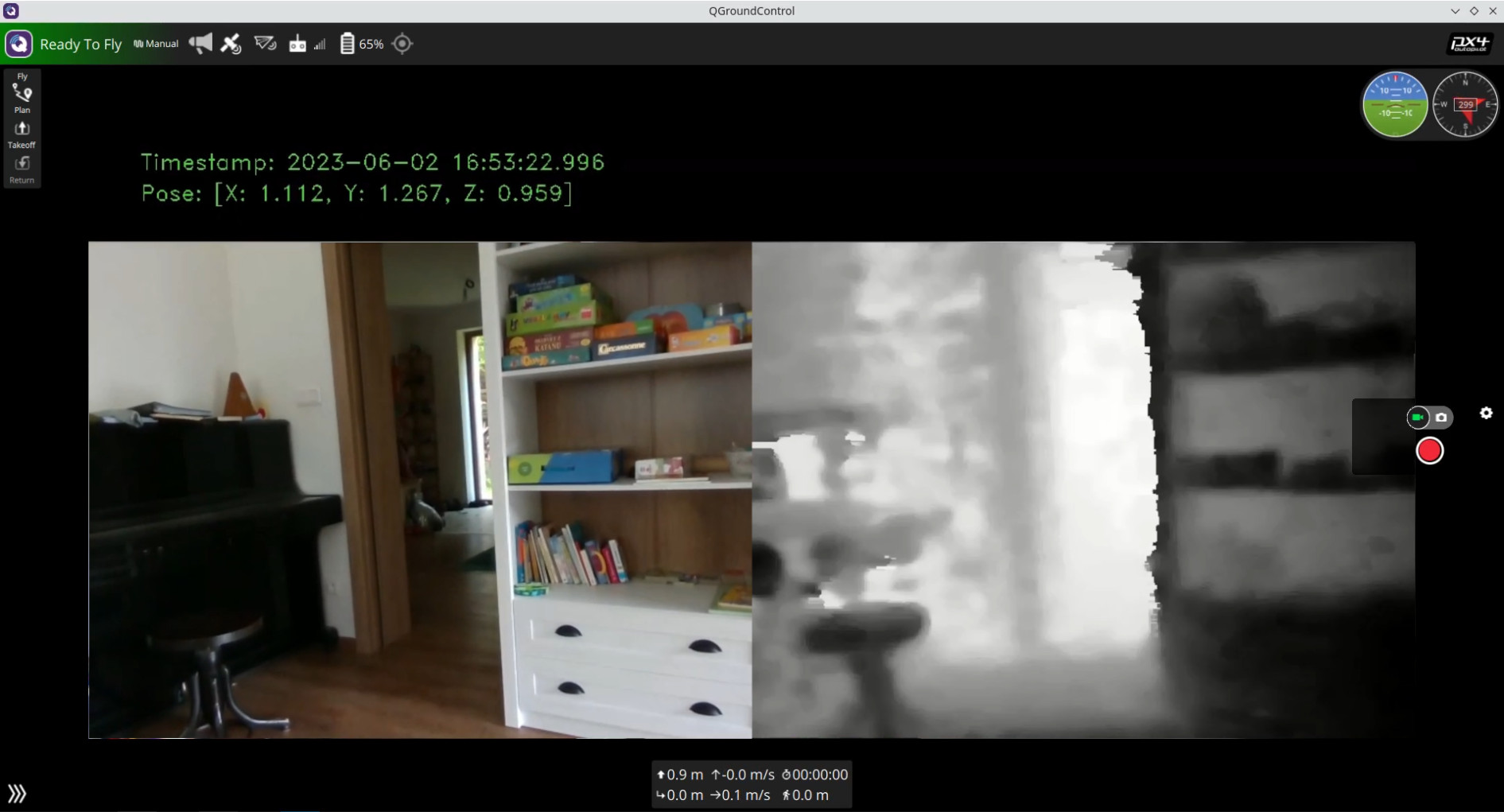
The main result of my dissertation thesis was the development of a drone capable of mapping and navigating in GPS-denied environments. I created a drone based on the Holybro X500v2 kit and equipped it with a depth camera, the Intel RealSense D435i, and a tracking camera, the Intel RealSense T265. As the flight controller, I used the Pixhawk 6x with PX4 firmware. Navigation and mapping were achieved by using the RTAB-Map SLAM algorithm. The drone was controlled by a companion computer, the Raspberry Pi 4, running Ubuntu and ROS2.
Learn more about my dissertation in the full article here.
Tech stack: C++, Python, ROS2, Gazebo, Docker, PX4
|
|
|
|
|
|
|
|